蘑菇车联目标分割算法排名全球第一 成功登顶自动驾驶算法排行榜
发布时间:2023年05月06日 16:50 作者:舒墨 来源:客车网
客车网2023年5月6日获悉,蘑菇车联运动目标分割算法近日登上KITTI 数据集Moving Object Segmentation任务榜单第一。该任务关键在于能够准确且快速地将激光雷达识别出来的点云图像中运动部分分割出来,比如行驶中的车辆、过马路的行人、地面爬行的小动物,甚至是一片飘落的树叶。
运动目标分割算法的难点是同时保证算法的准确性和实时性,蘑菇车联在这两项指标上都远超行业水平。研究团队利用不同视图信息互补的特性等方式来提高算法识别准确性,识别时间仅需15毫秒;为了保证算法框架的实时性,团队将点云序列叠帧部分做了深度优化,目前对于5帧点云(每帧15万个点)进行叠帧,耗时仅2.5 毫秒。
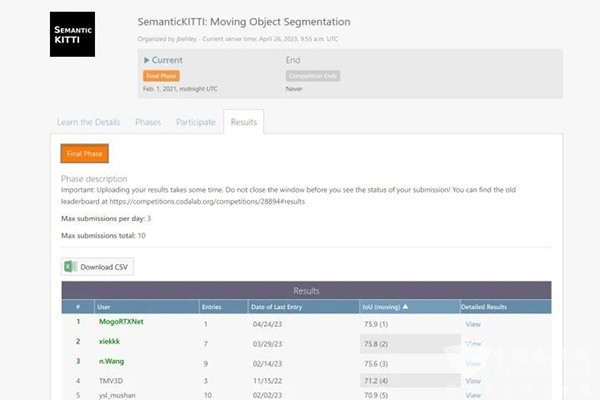
KITTI是目前国际上最大的自动驾驶场景下计算机视觉算法评测数据集,由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办。同时,该数据集提供了算法打榜功能,网站汇集大量相关的论文算法和场景真实数据,对自动驾驶算法研发有重要指导意义,是全球顶级自动驾驶公司、研究机构的“竞技场”。
运动目标分割算法在自动驾驶中的应用广泛,它可以将运动的点云剔除掉,仅保留静止的点云,从而帮助SLAM(即时定位与建图)更好地估计车辆位姿变化和建图;该任务也可以将运动的点云聚类并输出给轨迹预测或轨迹决策规划模块,使得自动驾驶车及时地避让运动的物体。
蘑菇车联持续在数字交通前沿技术领域实现突破,相关研究成果涵盖目标分割、目标识别、目标跟踪、融合感知以及交通参与者轨迹预测等重要环节,全环节保证L4级自动驾驶系统Mogo AP的安全性。截至目前,蘑菇车联多项算法在国际权威数据集榜单中排名居于前列,包括KITTI、nuScenes等,研究成果被ICRA、IROS、IEEE等国际权威学术机构认可。
链接:https://www.chinabuses.com/supply/2023/0506/article_105344.html
客车网推荐阅读
客车网[www.chinabuses.com]版权及免责声明:
1、凡本网注明“来源:www.chinabuses.com” 的所有作品,版权均属于客车网,未经本网授权,任何单位及个人不得转载、摘编或以其它方式使用上述作品。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:www.chinabuses.com”。违反上述声明者,本网将追究其相关法律责任。
2、凡本网注明 “来源:XXX(非客车网)” 的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。
3、如因作品内容、版权和其它问题需要同本网联系的,请在30日内进行。
※ 有关作品版权事宜请联系:copyright#chinabuses.com
1、凡本网注明“来源:www.chinabuses.com” 的所有作品,版权均属于客车网,未经本网授权,任何单位及个人不得转载、摘编或以其它方式使用上述作品。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:www.chinabuses.com”。违反上述声明者,本网将追究其相关法律责任。
2、凡本网注明 “来源:XXX(非客车网)” 的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。
3、如因作品内容、版权和其它问题需要同本网联系的,请在30日内进行。
※ 有关作品版权事宜请联系:copyright#chinabuses.com
热点新闻
- 1个平台、3款车型!宁德时代与Togg达成磐石底盘量产合作[05-07]
- 采埃孚强化技术聚焦:彼得·霍德曼博士兼任首席技术官[04-28]
- 四大核心优势 系统效率超94%!东风德纳 “劲擎王” 电驱桥首发[04-17]
- 因为品质所以信赖 东风德纳连续第十年获评中车电动“优秀供应商”[04-10]
- 碾压级实力!潍柴NG4.0 Pro问世,200万公里寿命+5年质保太疯狂[04-10]
- 潍柴NG4.0 Pro,震撼将至![04-09]
- 强强联合!广州公交集团携手宁德时代,共筑绿色智慧交通新生态[04-09]
- 合作再升级!宜运股份与宁德时代签约 打造V2G双向充放新样板[04-03]
品牌推荐
更多>>

南京金龙公司总部新厂区位于南京溧水开发区,旗下有大客车、轻型车、乘用车...
![[客车专题] 2026年全国两会 聚焦客车行业“十五五”高质量发展](https://www.chinabuses.com/uploadfile/2026/0305/20260305045023619.jpg)















